В данном уроке рассмотрим, как искать в интернете готовую модель стандартного покупного пневмоцилиндра, подходящего под наши требования.
Далее прямо на сайте одного из производителей сконфигурируем его, добавим два сенсора и скачаем готовую сборку пневмоцилиндра для дальнейшего ее “безболезненного” открытия в Inventor.
В программе создадим несколько позиционных представлений штока (открыт, закрыт, рабочий ход) и подготовим пневмоцилиндр для вставки в сборку.

Наш пневмо захват будет приводиться в движение с помощью пневмоцилиндра. Пневмоцилиндр – это покупная стандартная деталь, поэтому его модель мы будем искать в интернете по запросу стандарты цилиндра ISO 21287. В одной из первых ссылок мы находим необходимый нам пневмоцилиндр, по диаметру поршня 10 мм.
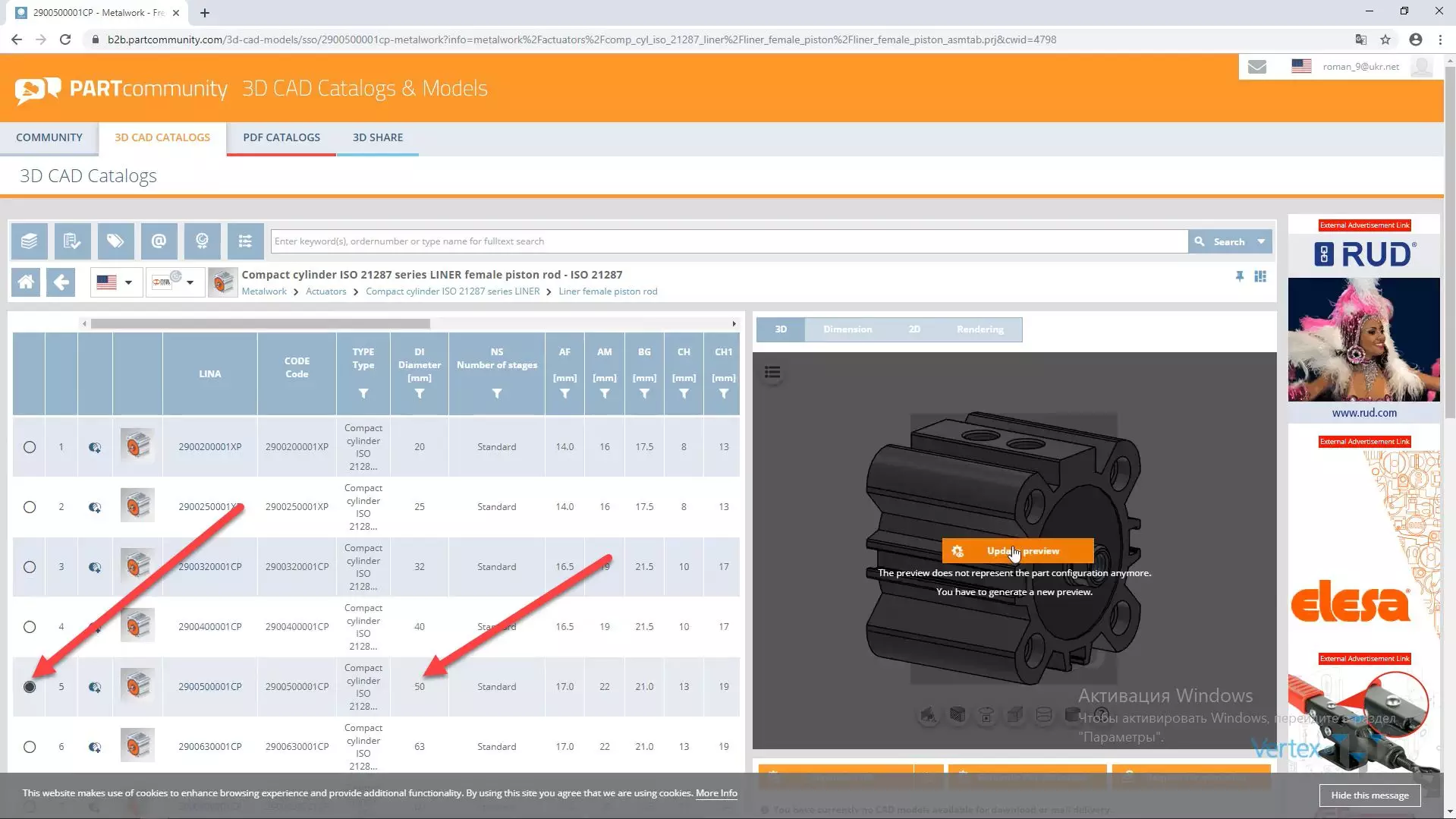
Мы выбираем необходимый типоразмер. Здесь же, на сайте, можно посмотреть предварительно 3D модель, и посмотреть размеры сгенерированной детали.

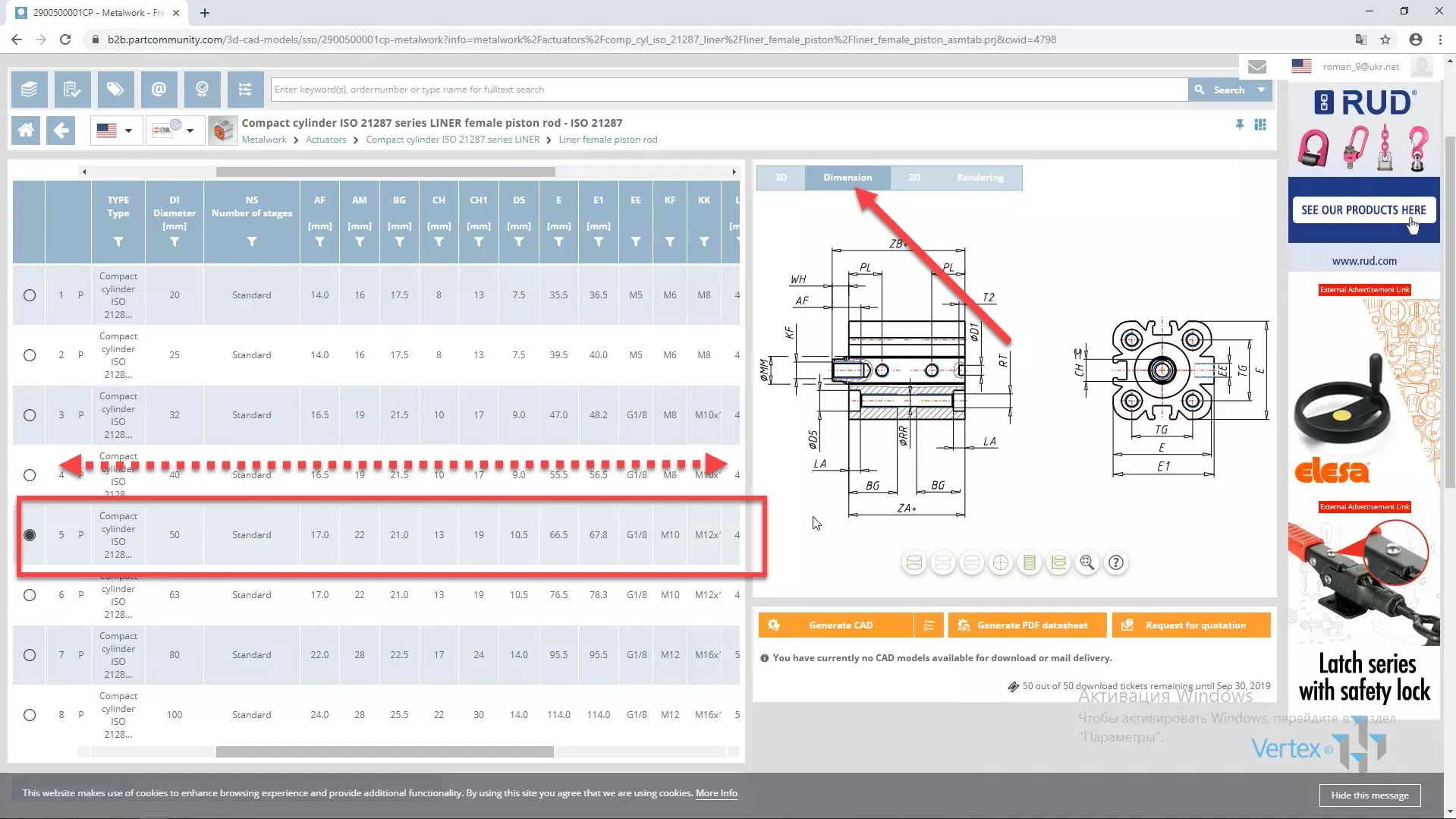
Проверяем, все ли размеры нам подходят, и дальше переходим непосредственно к генерации необходимого нам пневмоцилиндра. Нам необходимо указать несколько параметров. Вход цилиндра укажем 60 мм.
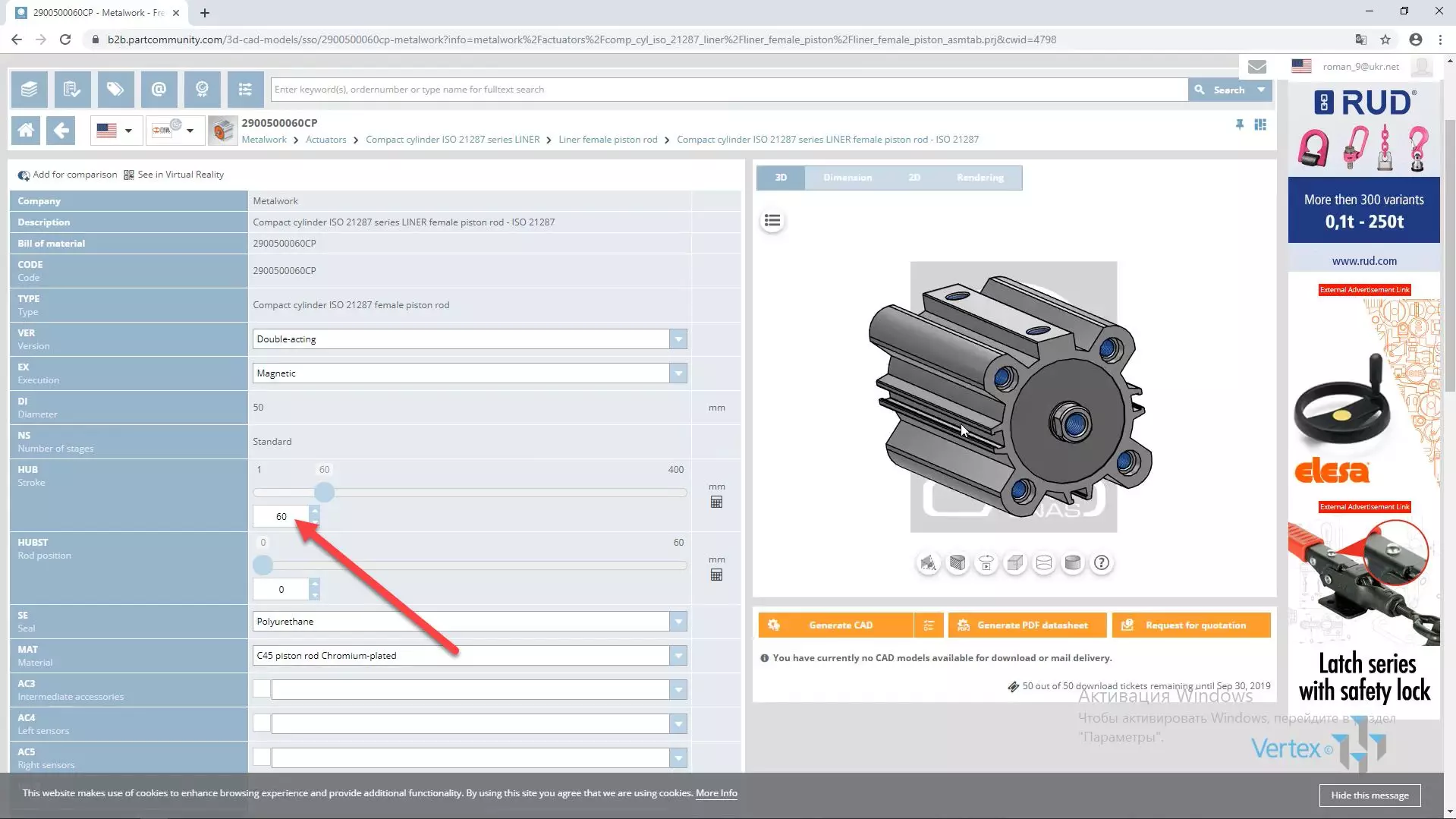
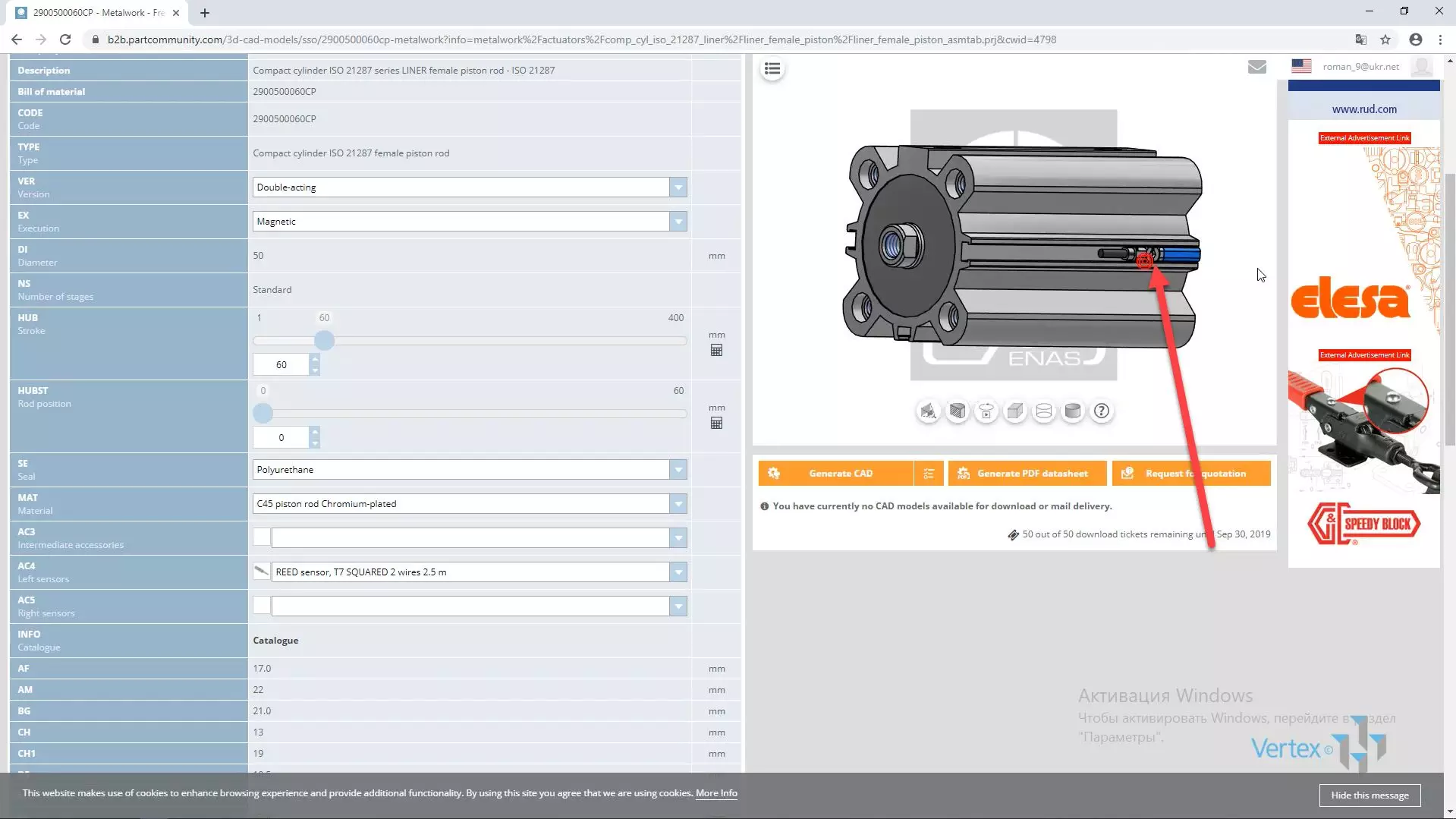
Обновим предварительный просмотр и видим, что получается цилиндр, который нам необходим. Остальные параметры можно оставлять без изменения, только добавим электрический сенсор с обоих сторон пневмоцилиндра. Выбираем тип сенсора.
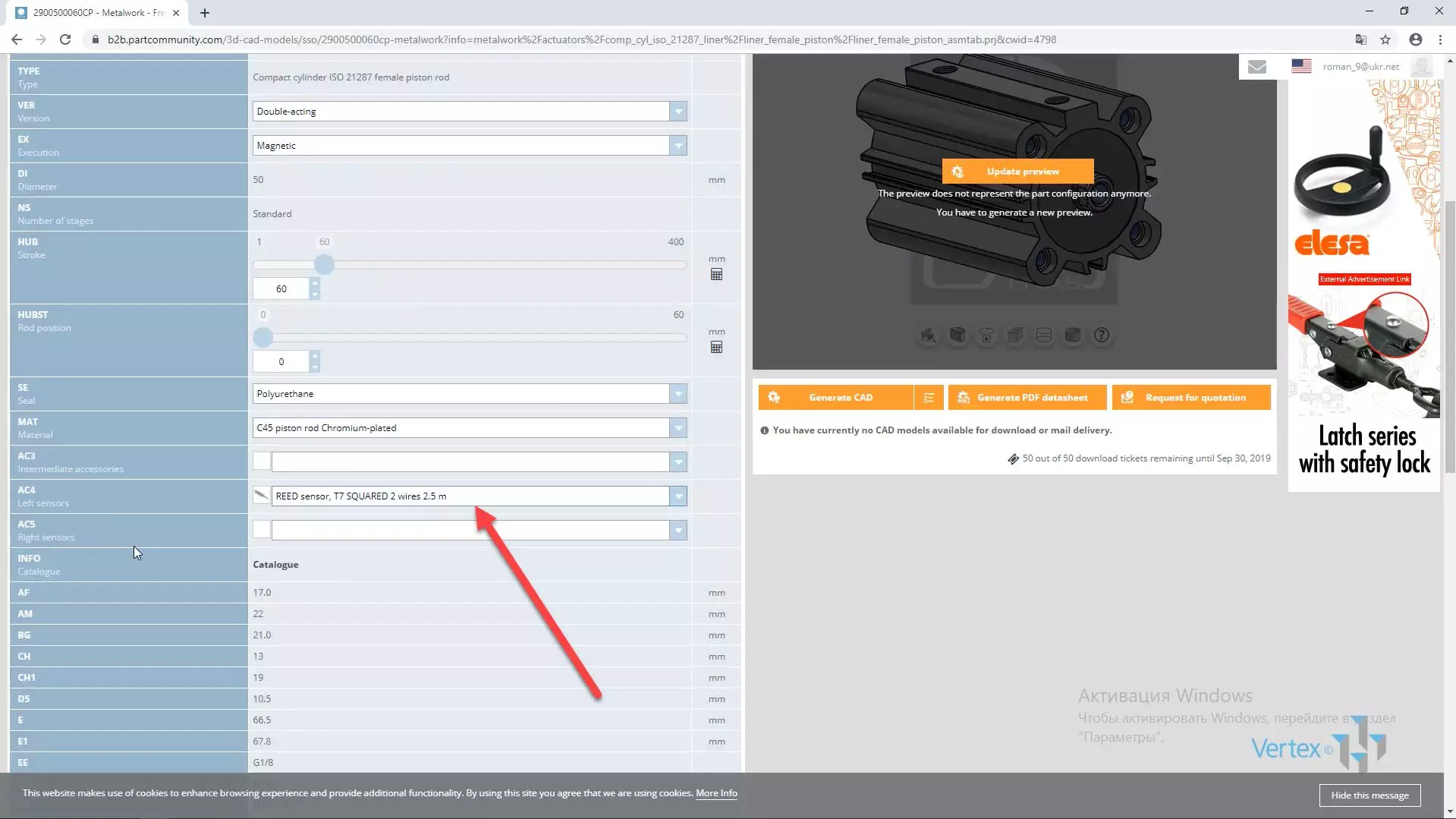
Обновим предварительный просмотр, и видим, где будет располагаться этот сенсор.
Такой же сенсор добавим с обратной стороны. Еще раз проверяем окончательно все размеры загружаемой детали, и нажимаем кнопку Сгенерировать модель.
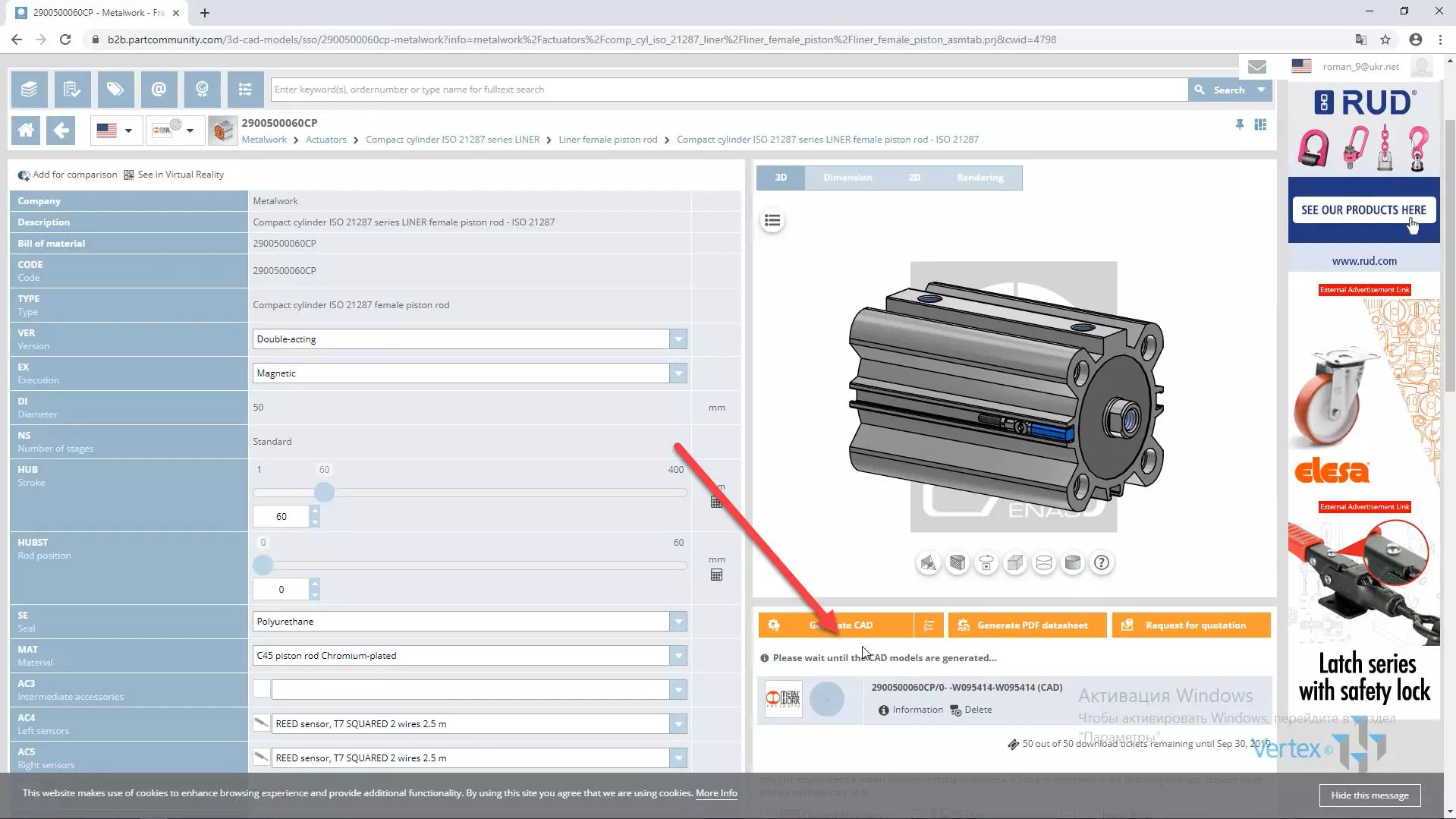
Такие генераторы 3D модели есть у многих производителей, поэтому зачастую найти необходимую деталь не так уж сложно. Итак, наша деталь сгенерировалась, нажимаем Загрузить.
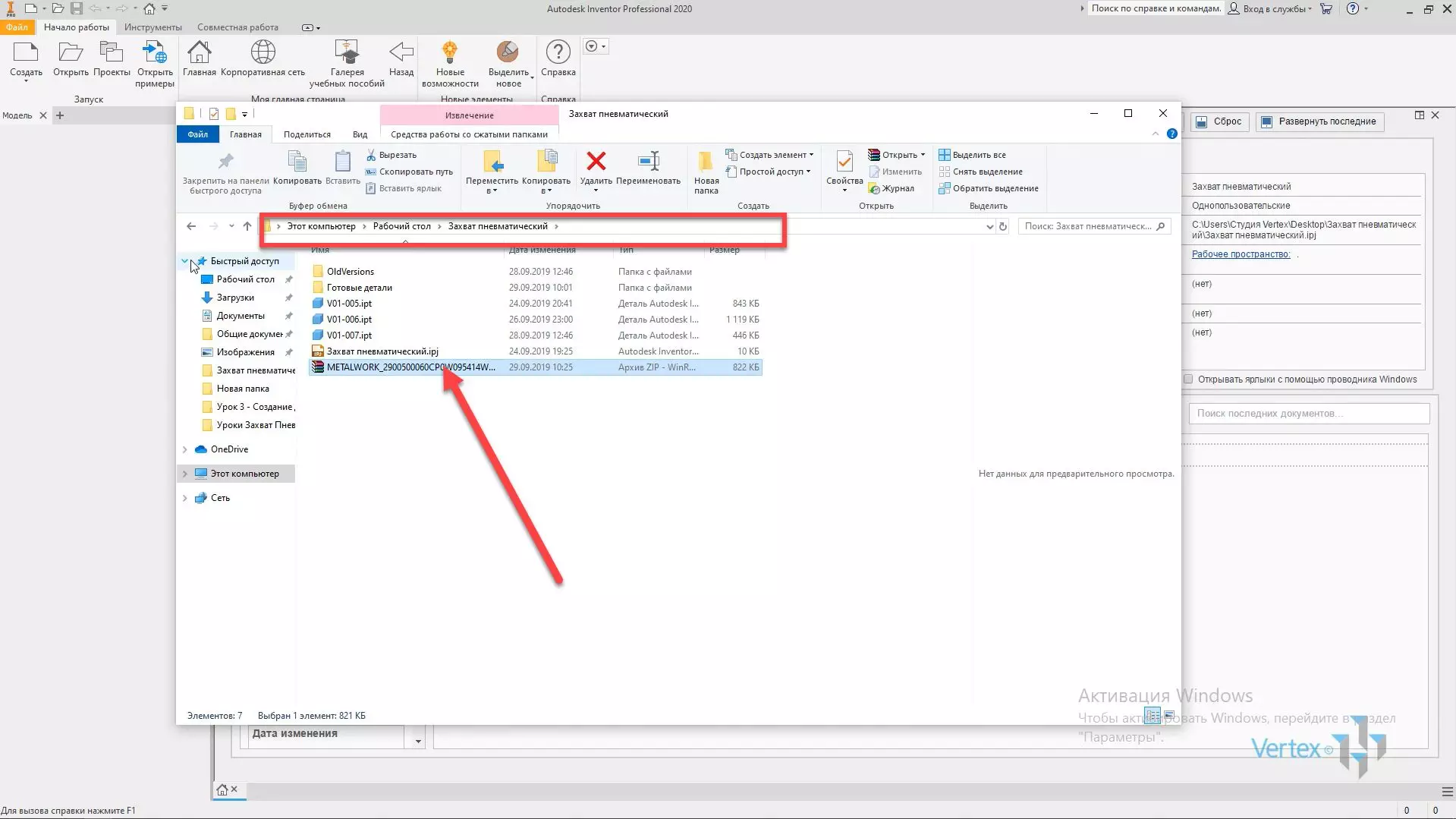
Переместим загруженный архив в папку с нашим проектом. Здесь распакуем архив, и откроем сборку.
Пневмоцилиндр загружен сразу в формате инвентора, поэтому никаких дополнительных конвертацией нам делать нет необходимости.
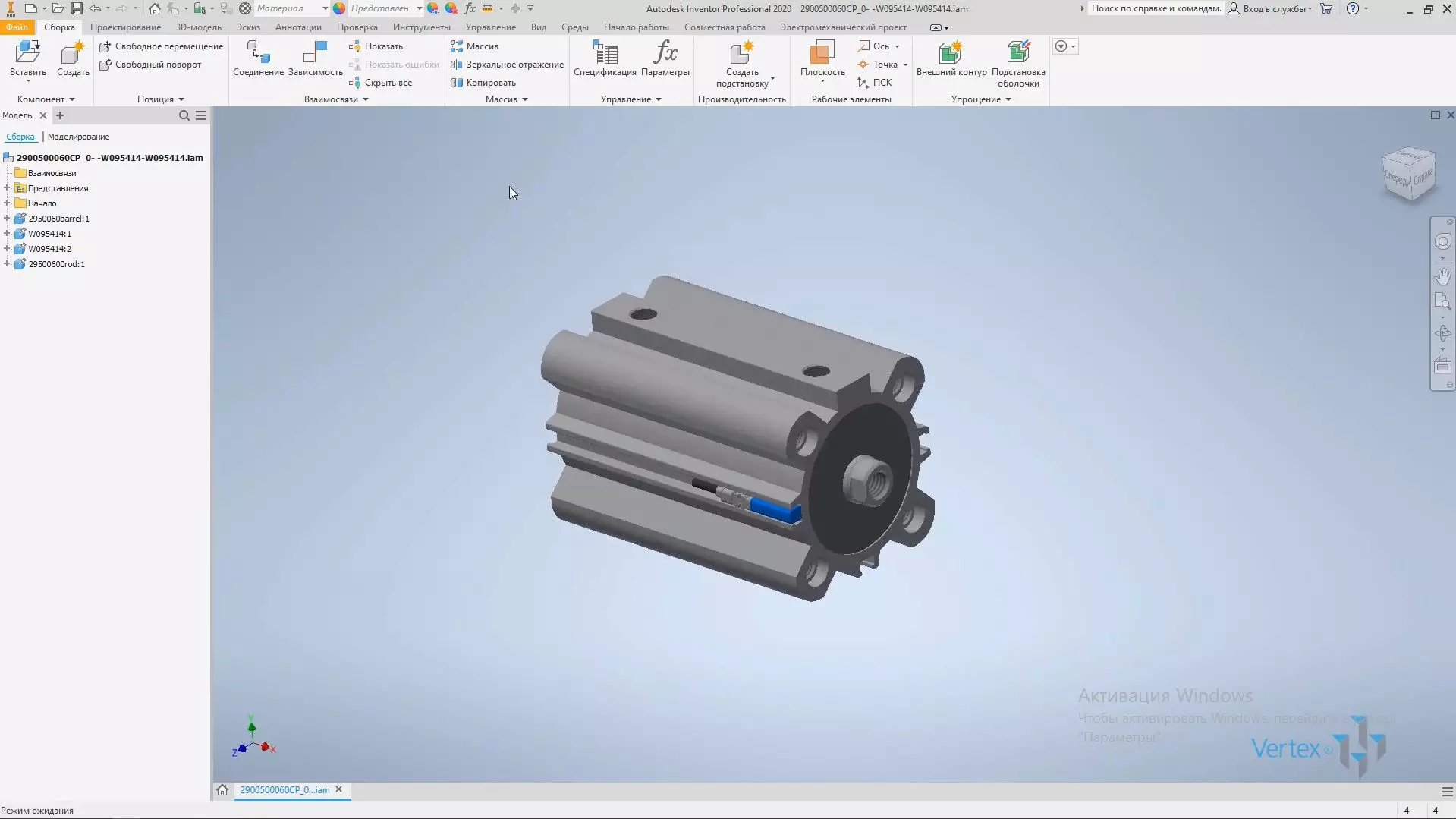
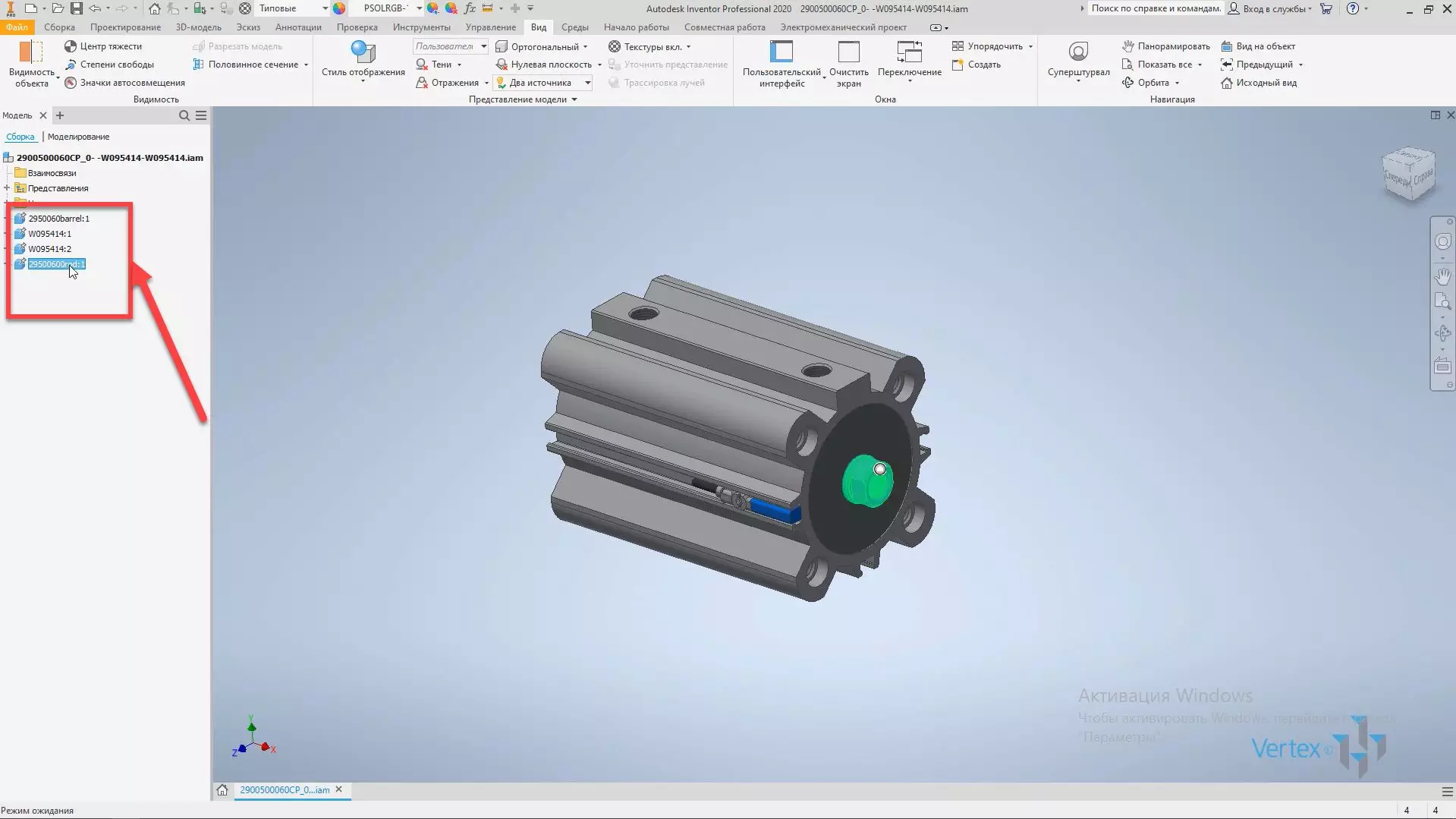
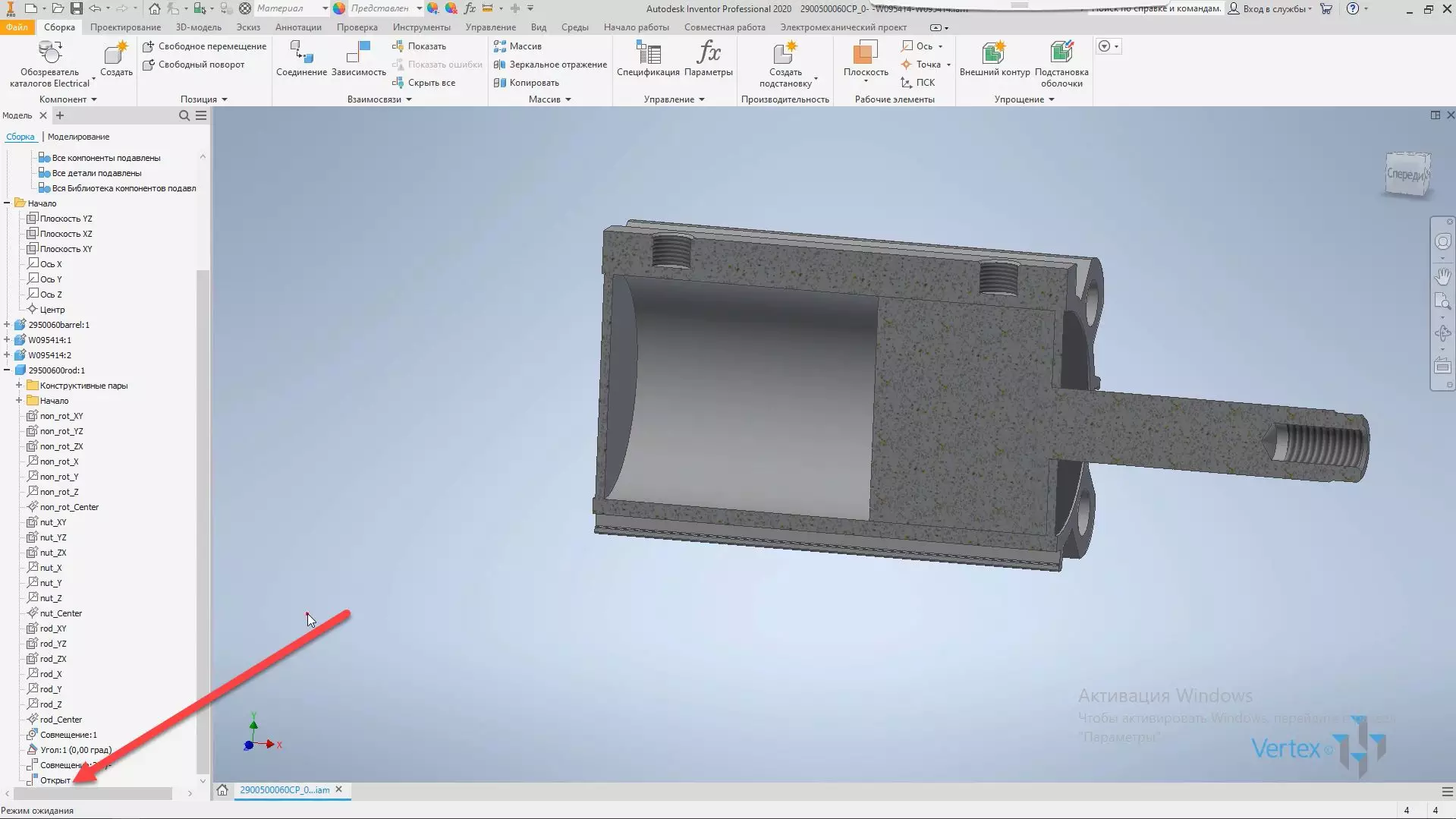
В сборке все 4 детали сейчас закреплены.
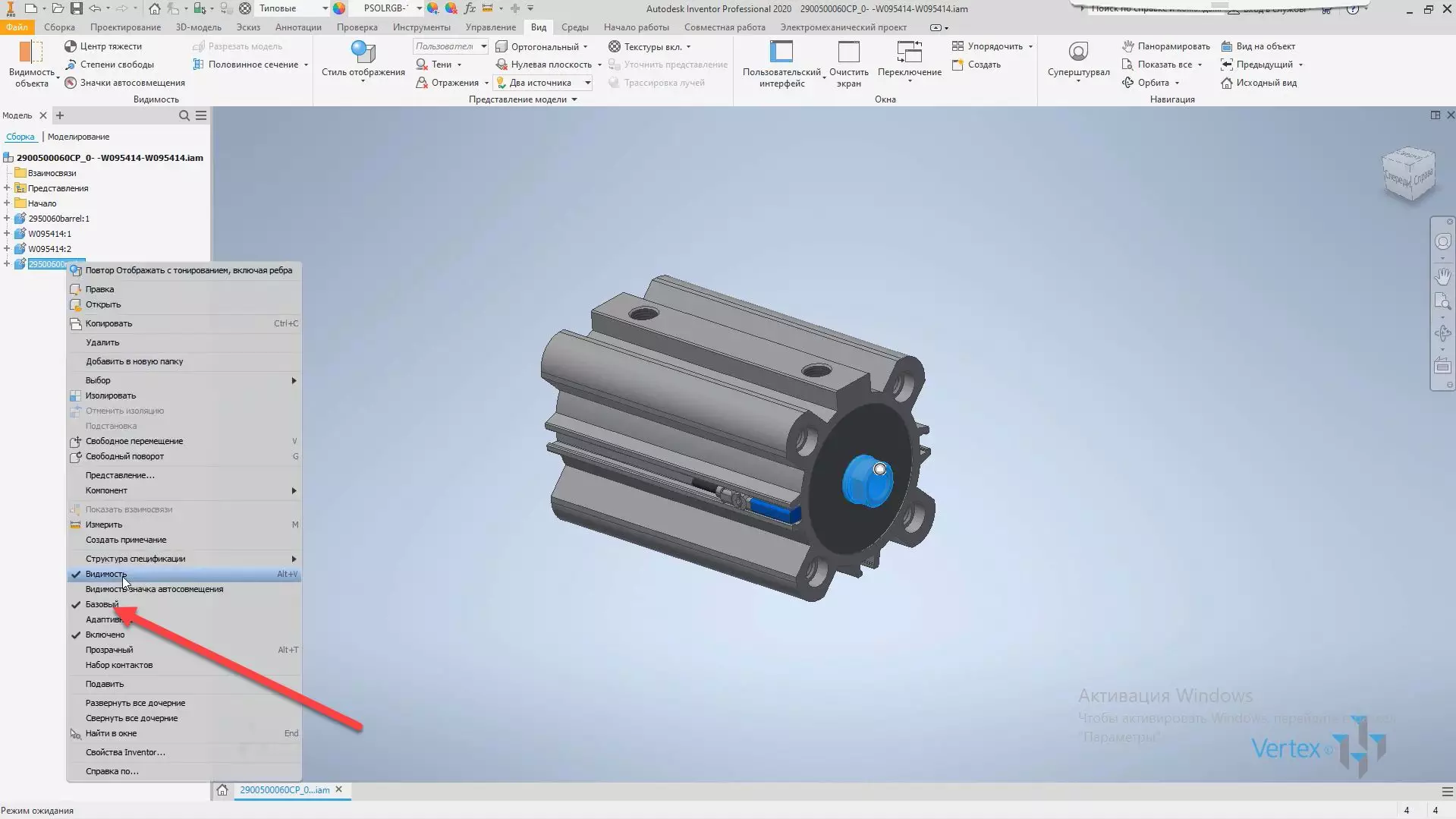
Выберем шток цилиндра, и снимем галочку Базовый для того, чтобы можно было сделать его подвижным.
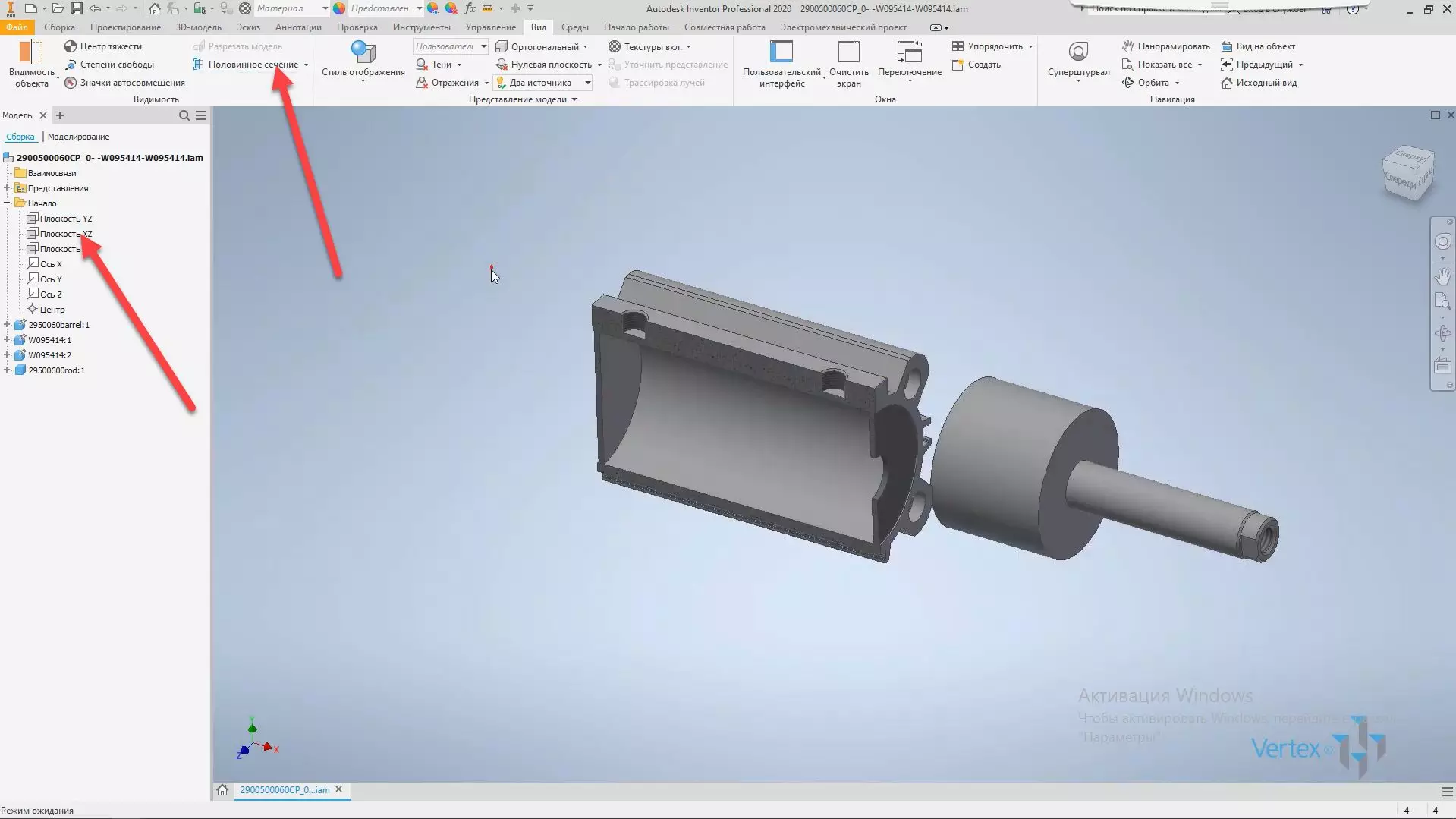
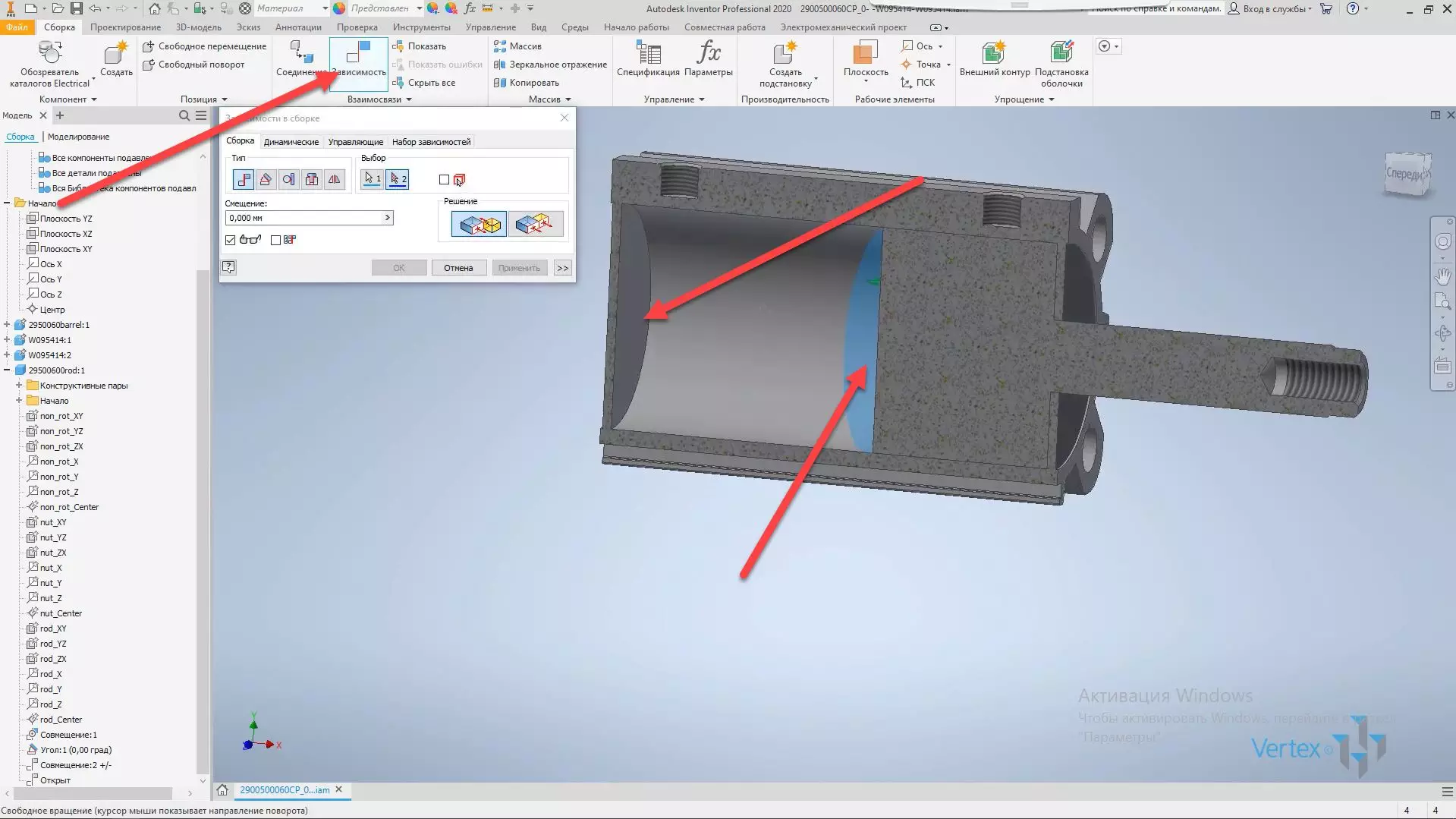
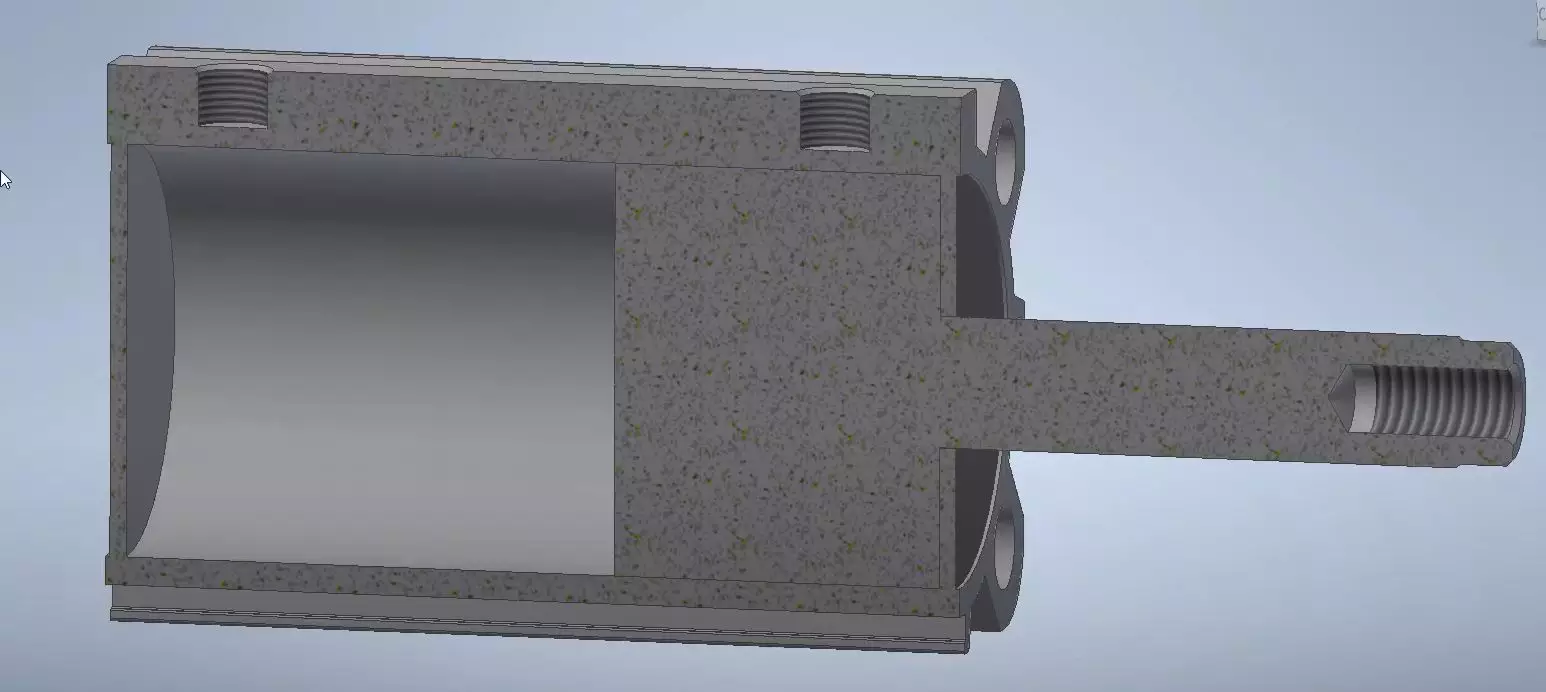
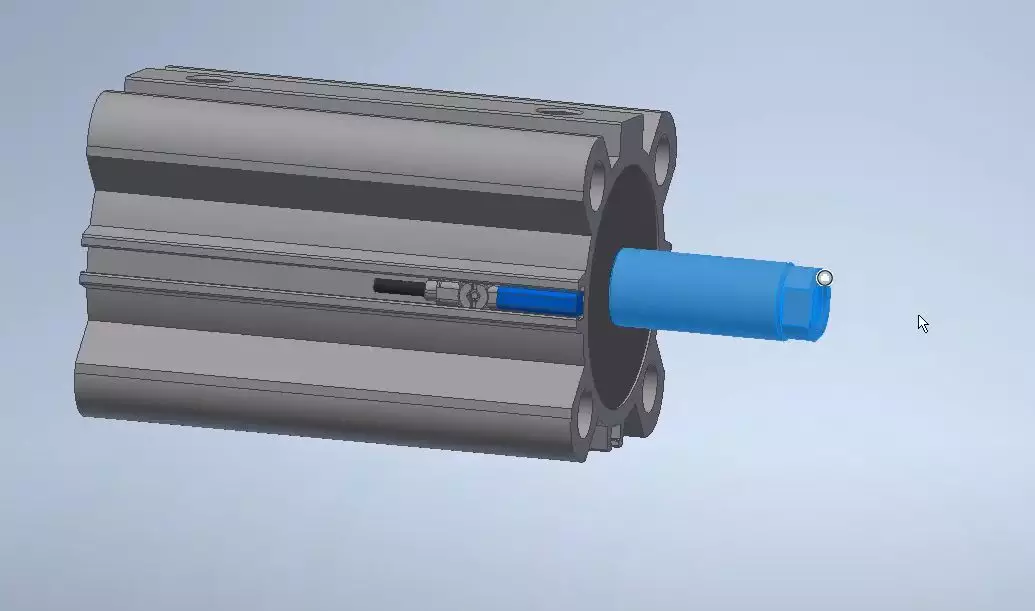
Сделаем половинное сечение сборки с помощью зависимости совмещение осей.
Закрепим шток в корпусе, и с помощью угловой зависимости закрепим шток, чтобы он не вертелся.
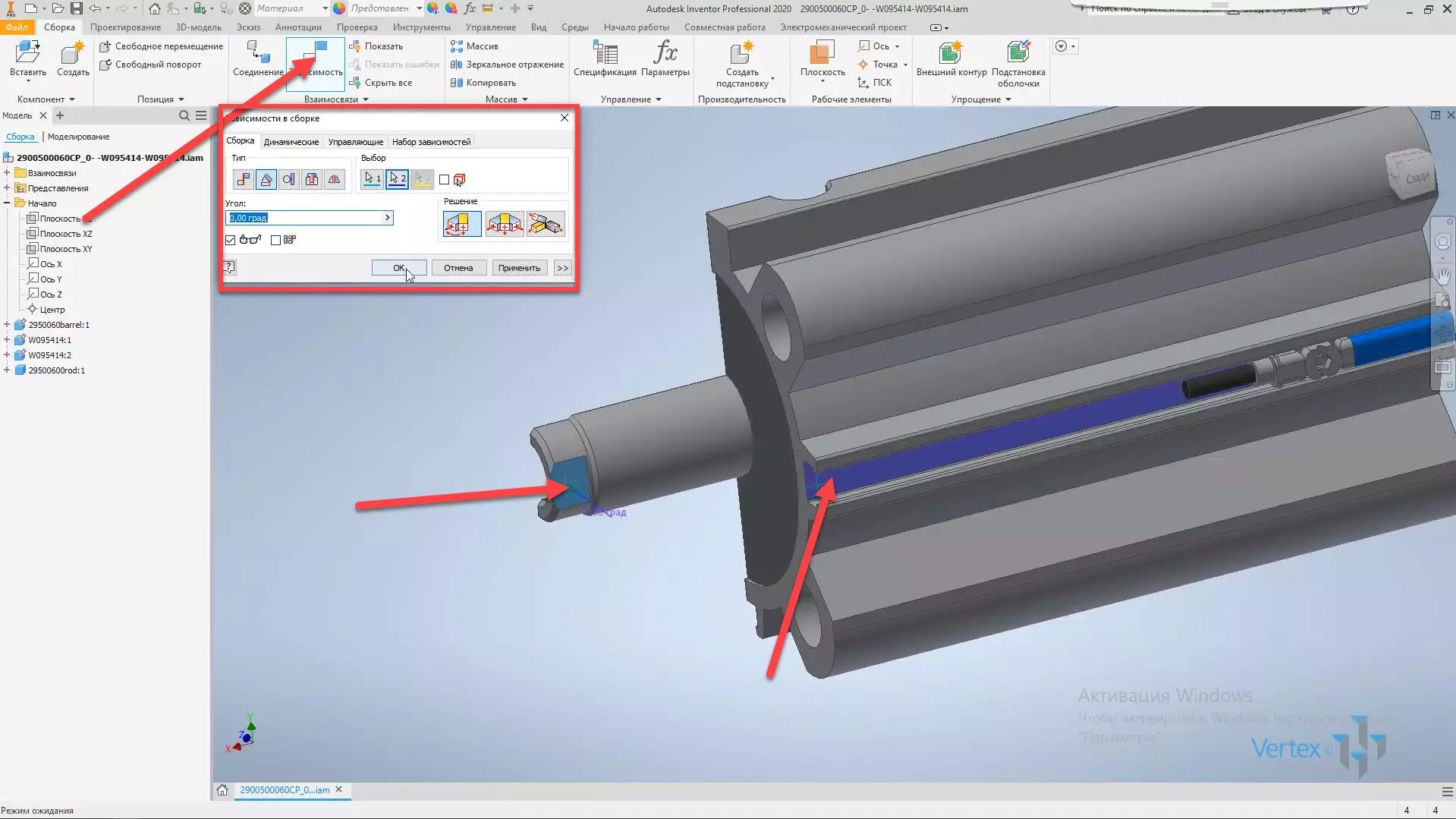
Теперь он ходит четко по оси корпуса.
С помощью еще одной зависимости совмещения закрепим шток в начальном положении.
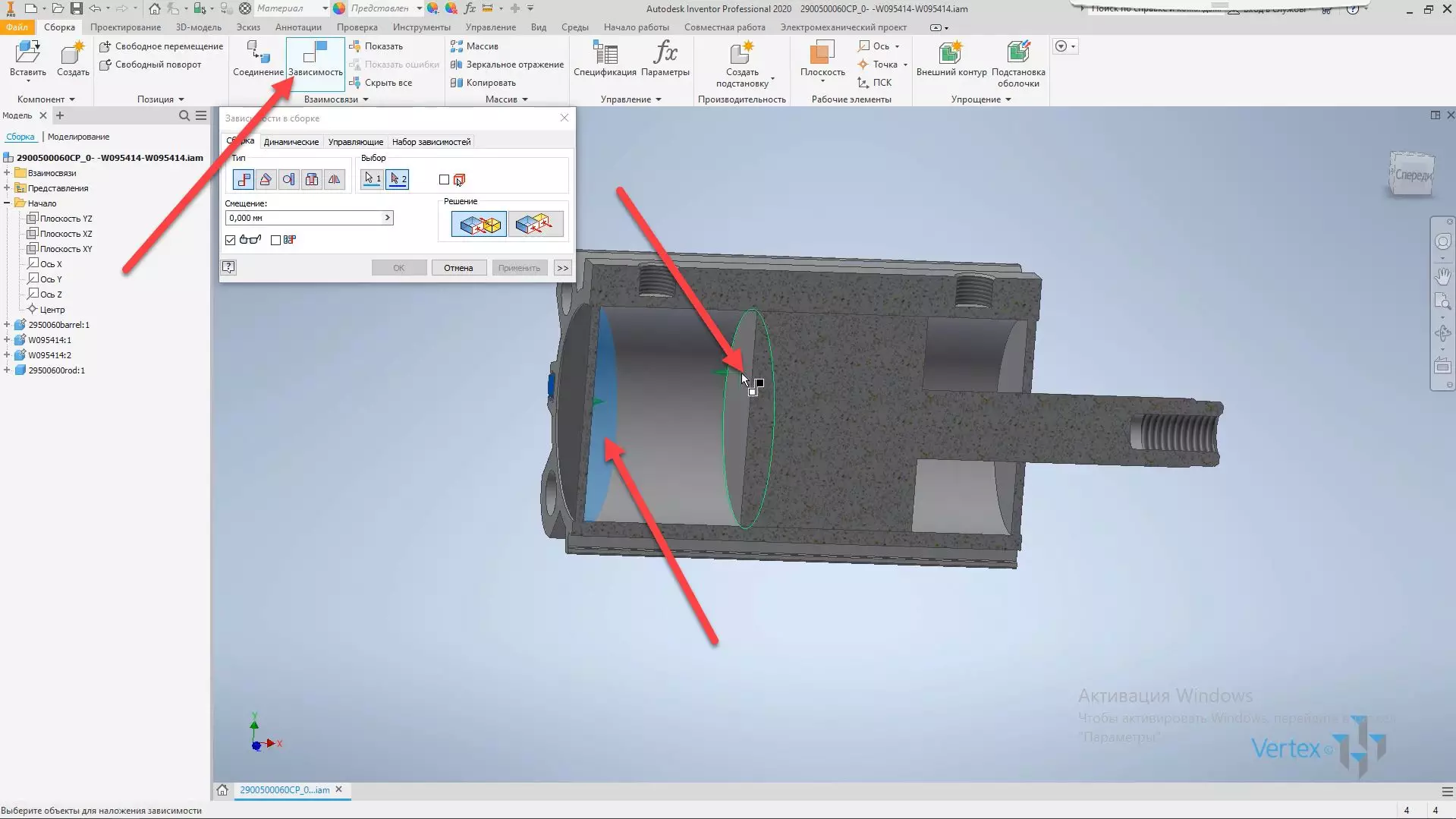
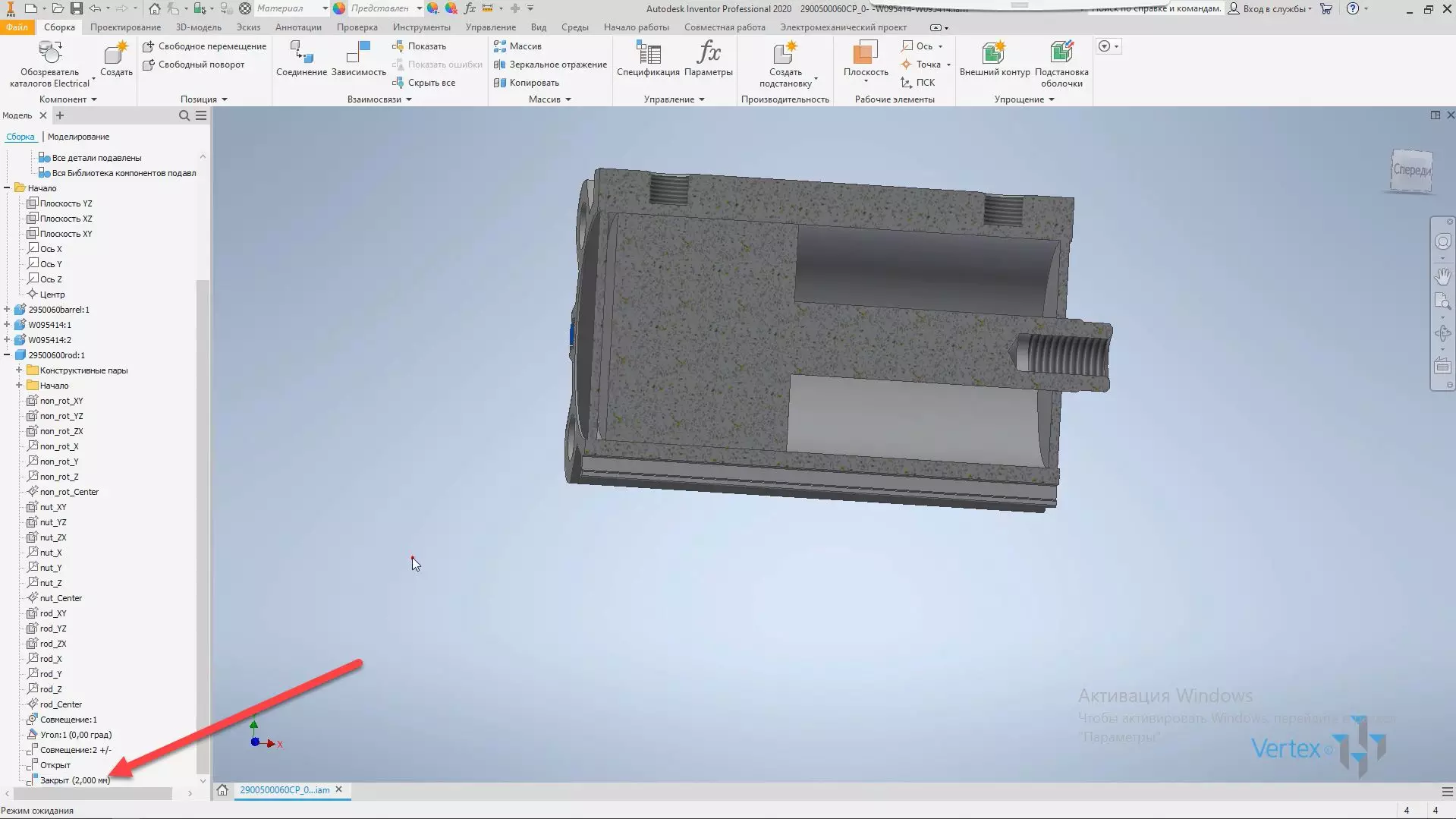
Укажем пределы, в которых может ходить шток нашего пневмоцилиндра. Итак, мы задали ход штока от 0 до 60 мм.
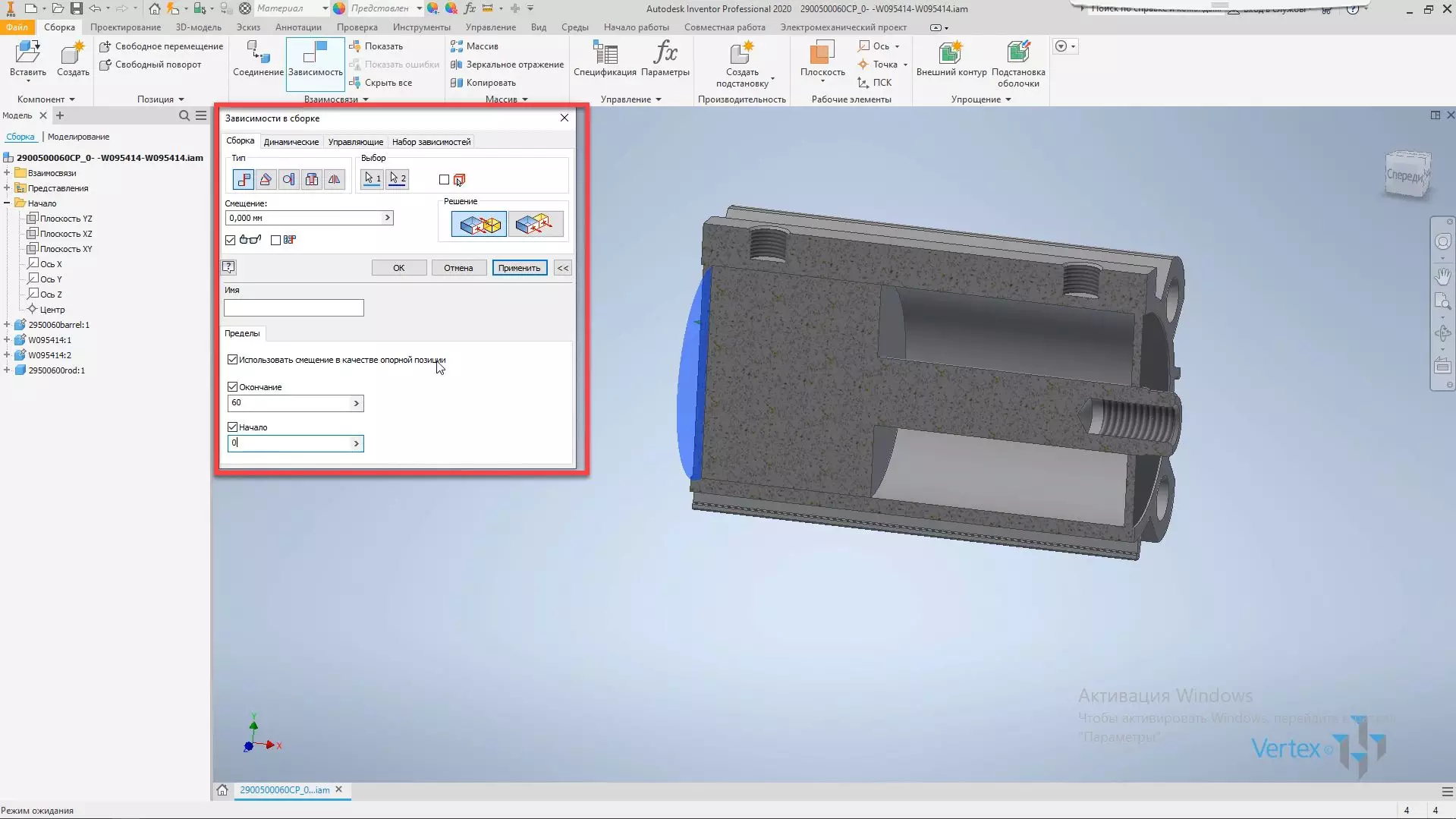
С помощью перетаскивания его удержанием мыши проверяем, что он ходит в этих пределах. Отредактируем эту зависимость, и зададим начальное положение штока 2 мм, и, соответственно, начало 2 мм.
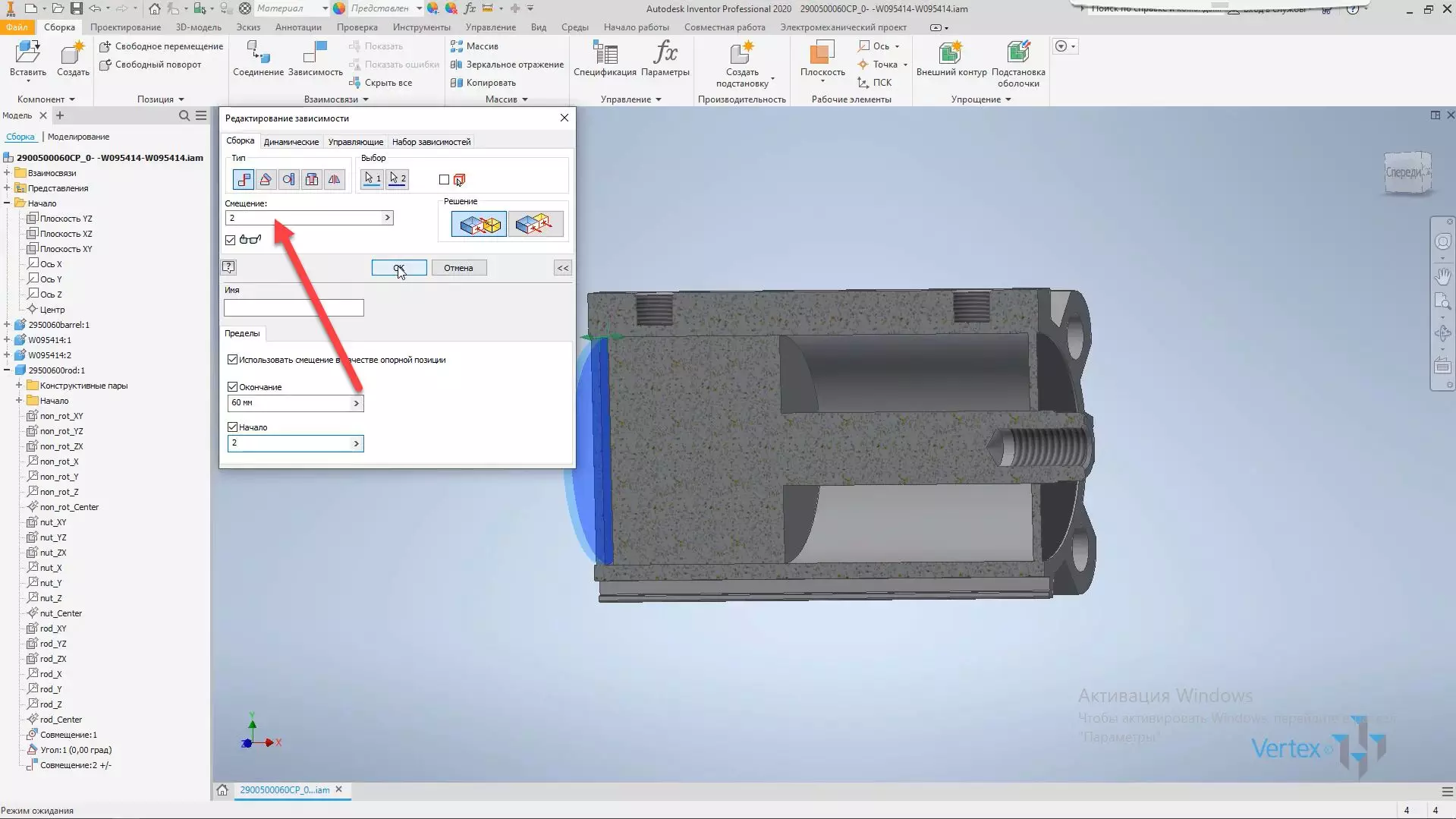
Соответственно в сборке шток цилиндра будет ходить в этих пределах. Дальше откроем в браузере папку представления и создадим позиционное представление.
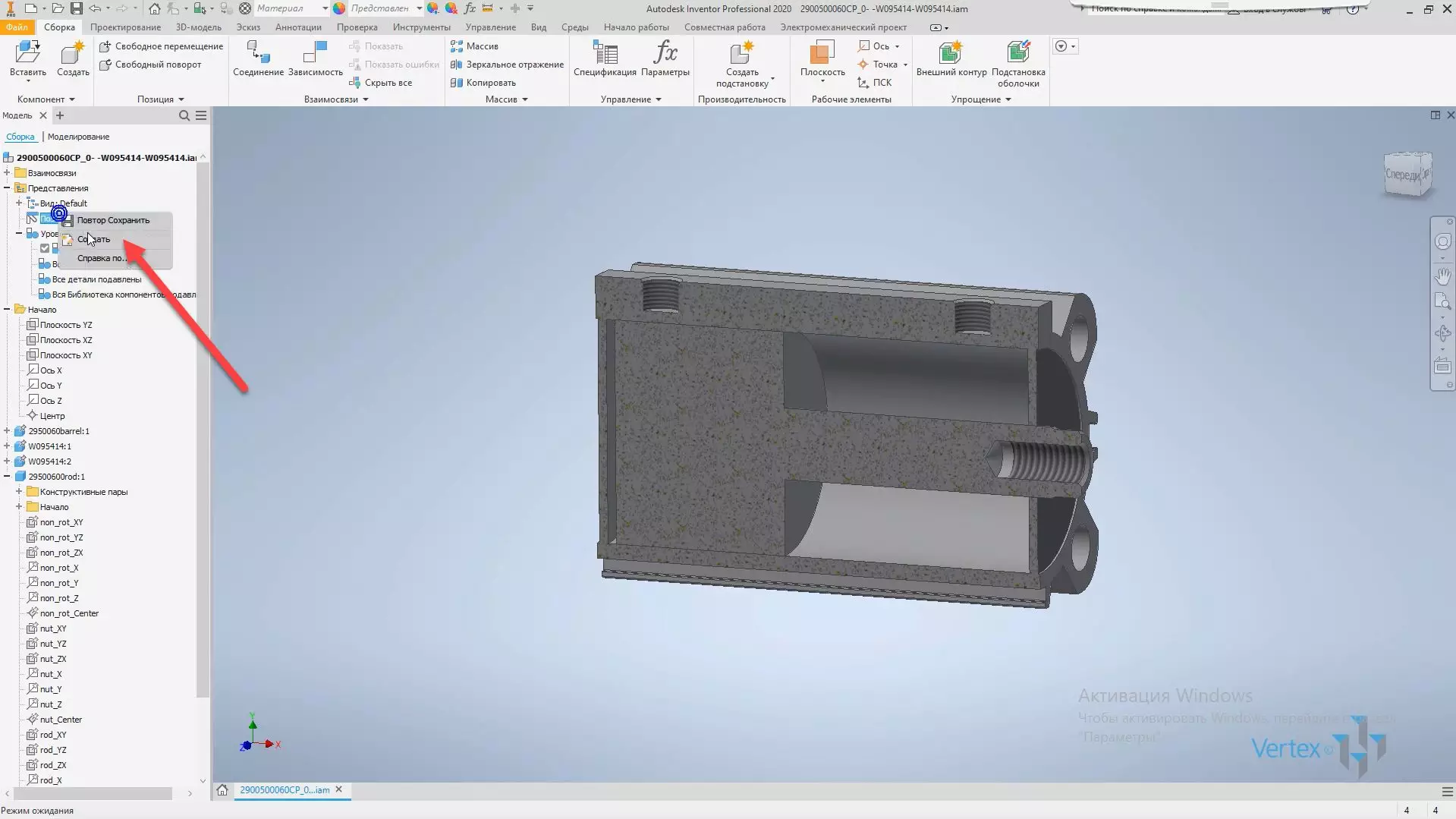
Первая позиция будет когда шток открыт.
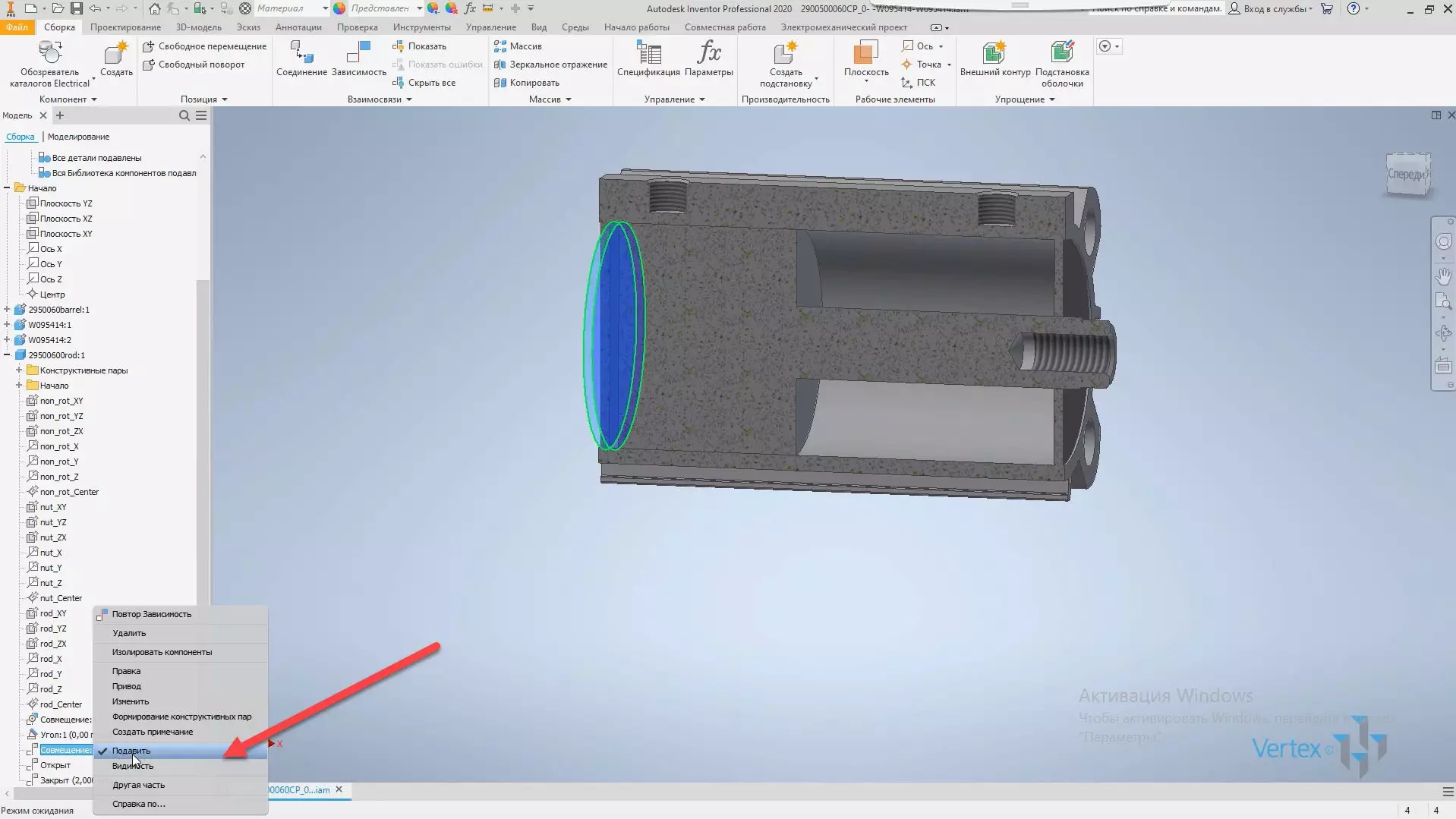
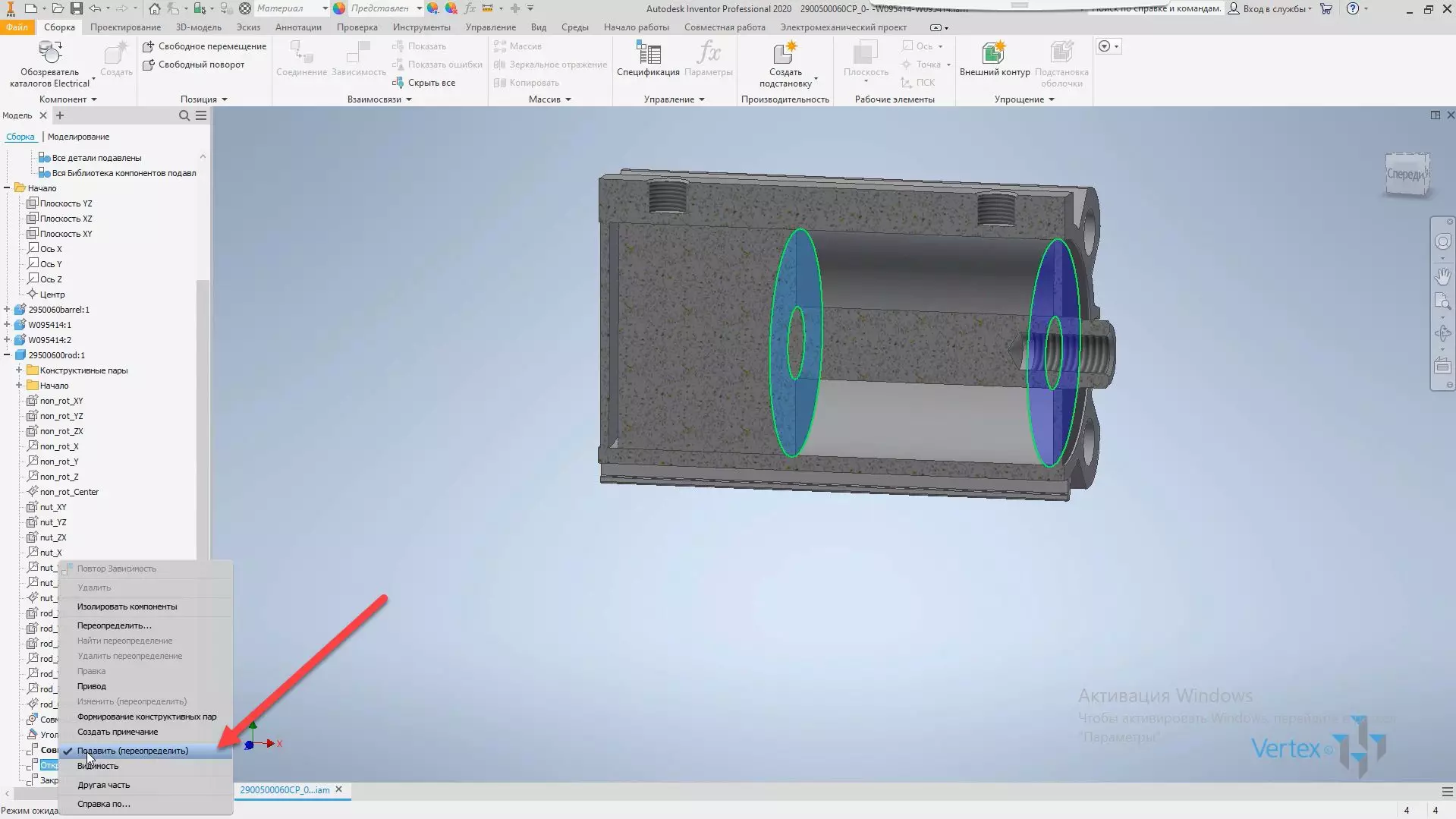
Здесь мы подавим предыдущие смещение.
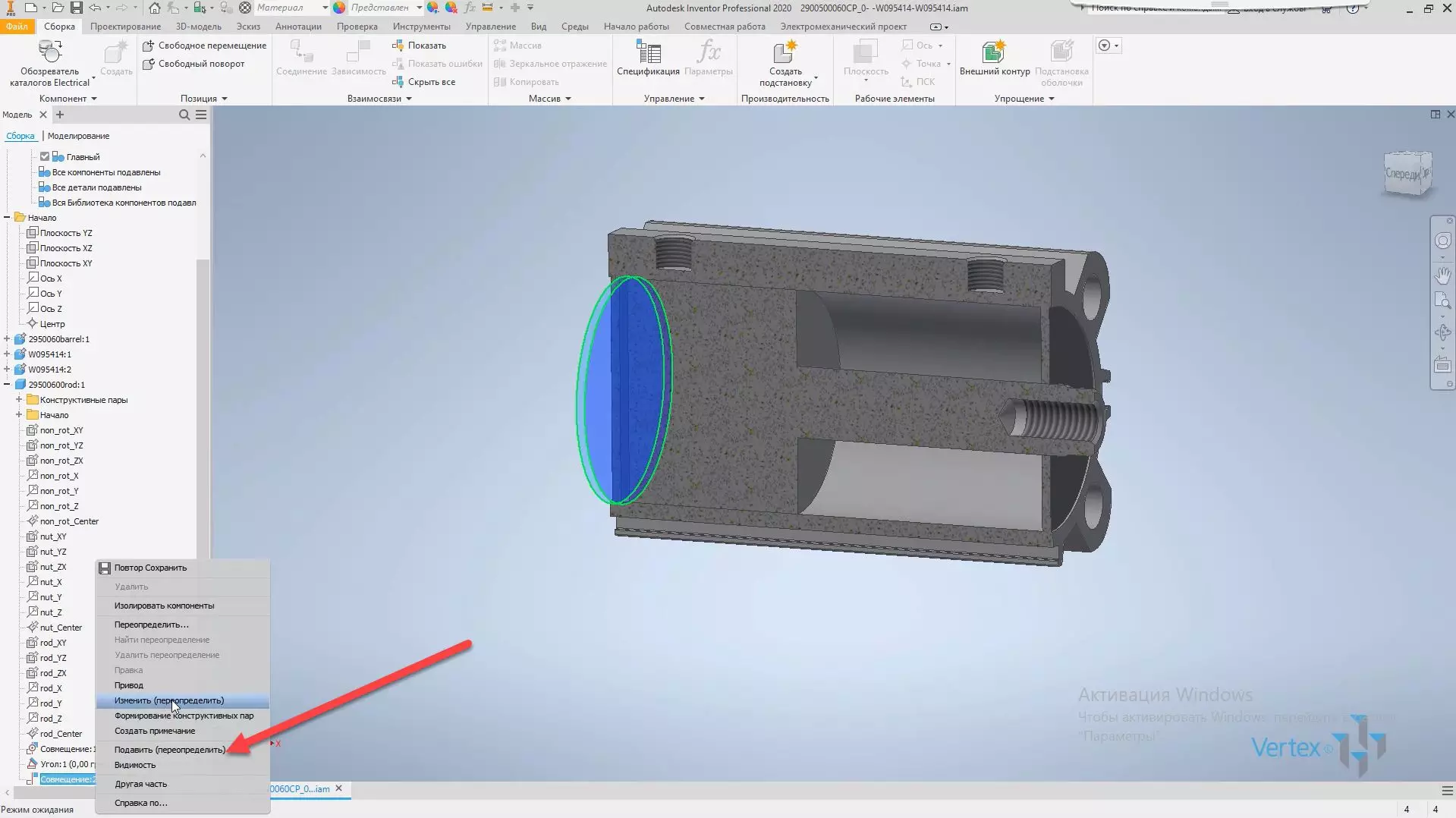
Временно подавим в главном представлении совмещения, и добавим еще одно, которое будет использоваться в позиции Открыть.
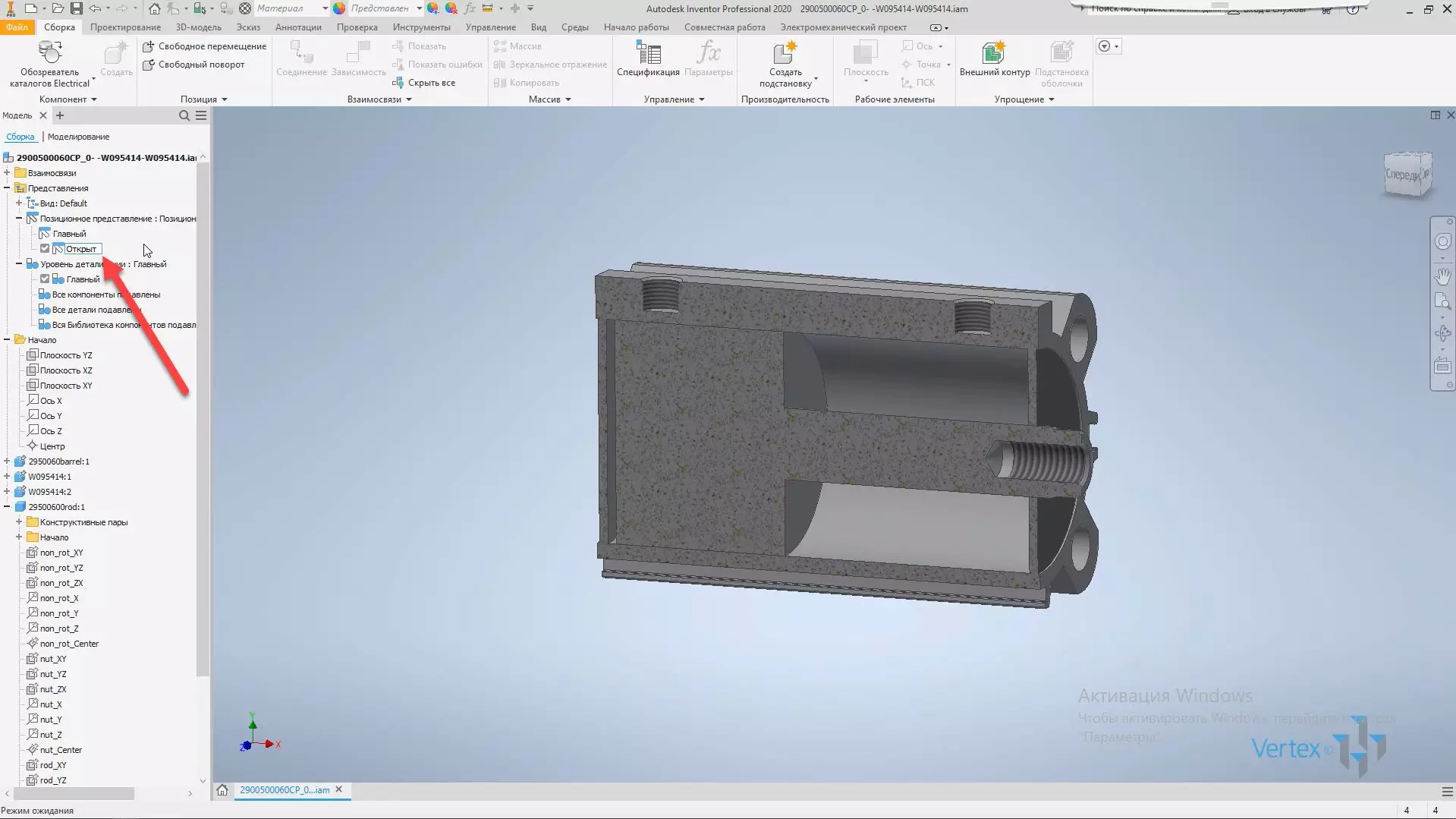
Созданное совмещение переименуем, назовем его Открыт.
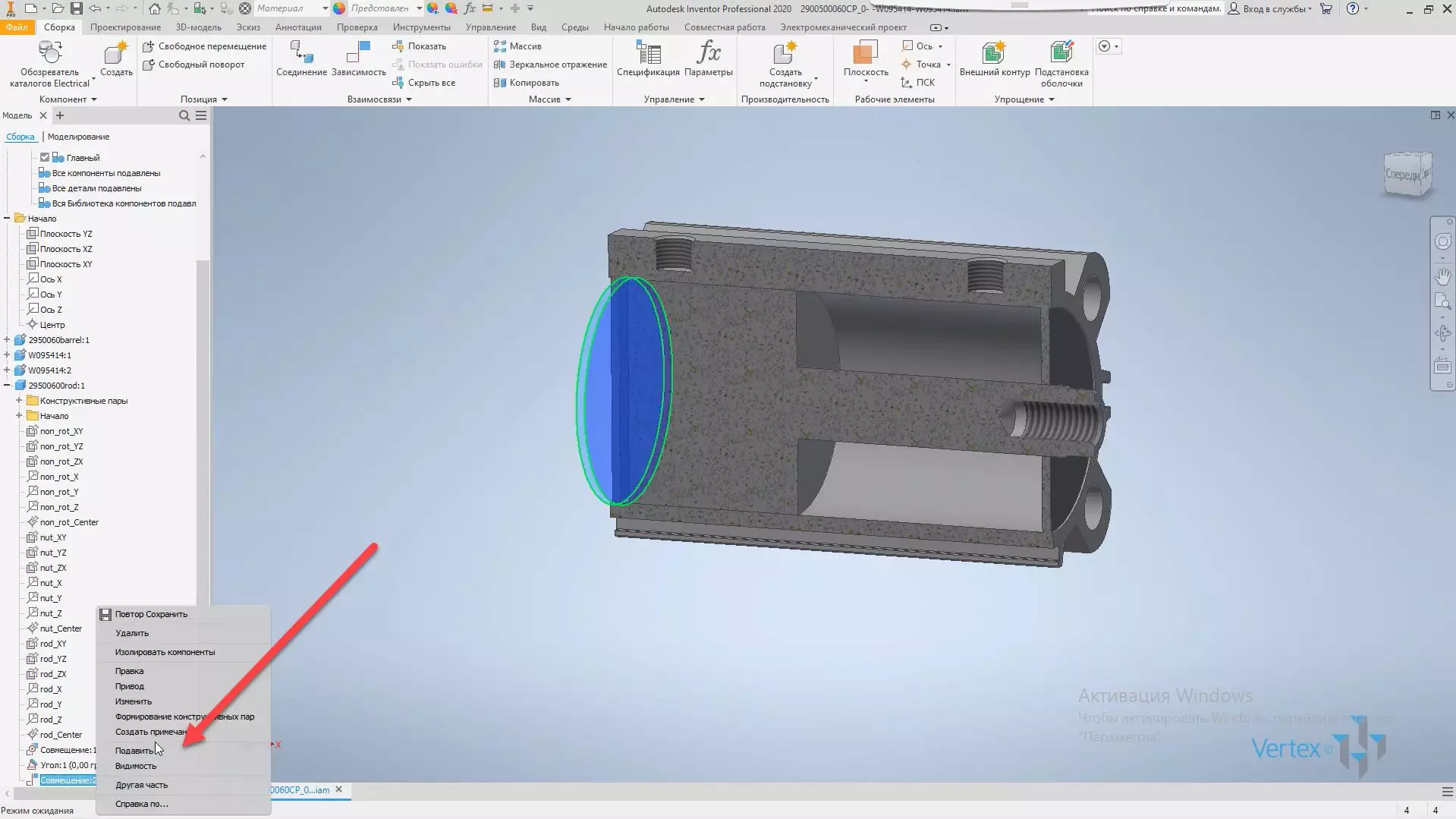
В главном положение его подавим. Добавим также совмещение, когда шток закрыт.
Итак, эта зависимость с размером 2 мм. Переименуем ее на Закрыт, и так же подавим.
В главной позиции снимем подавлении первого совмещения.
Дальше перейдем в позицию Открыт. Здесь включим зависимость Открыт.
Создадим еще одну позицию когда шток закрыт, и также переопределим необходимую зависимость.
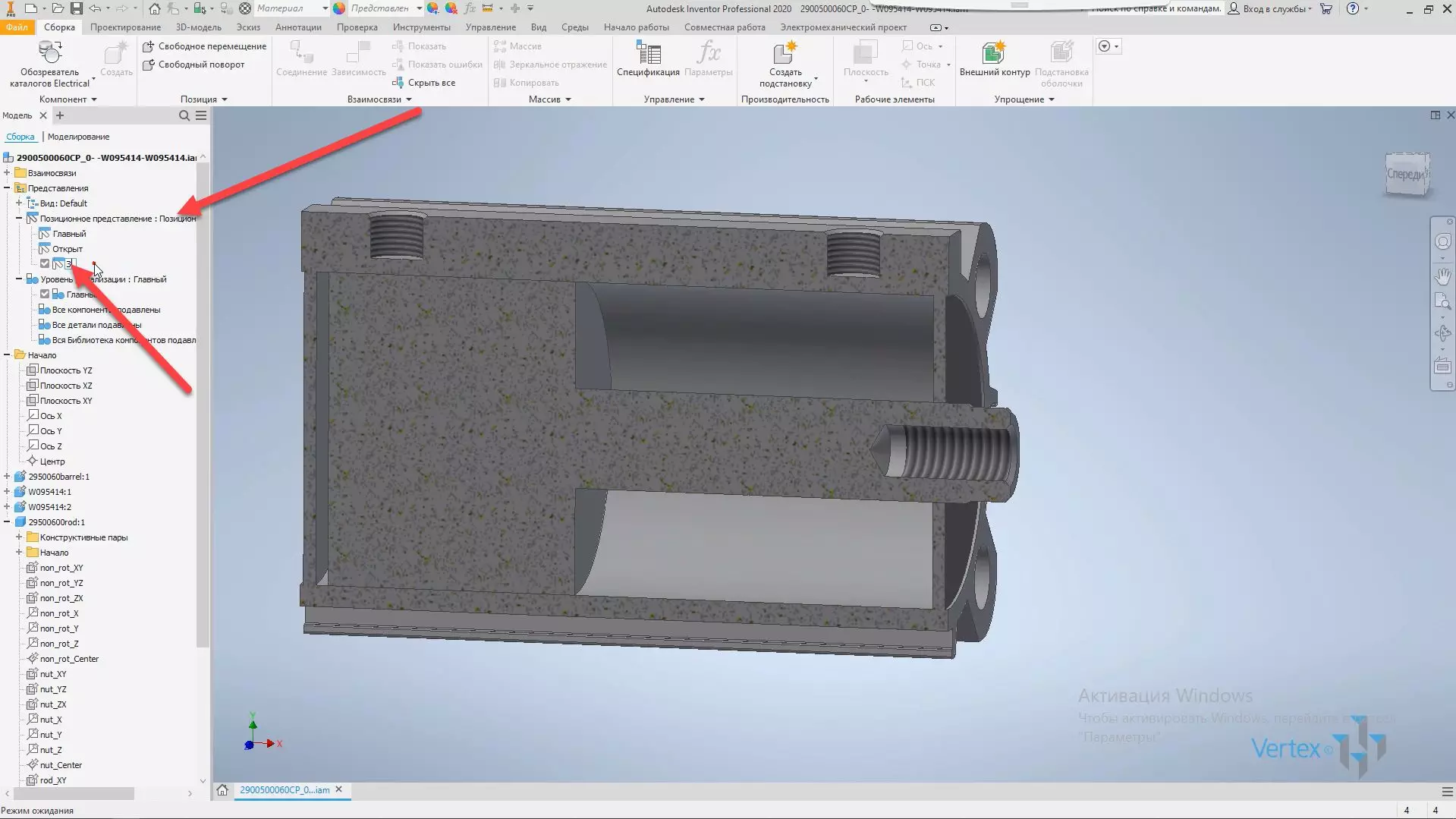
Сделаем активной зависимость Закрыт. Проверяем, что в полученных позициях Открыт – Закрыт, и в главной позиции шток подвижен.
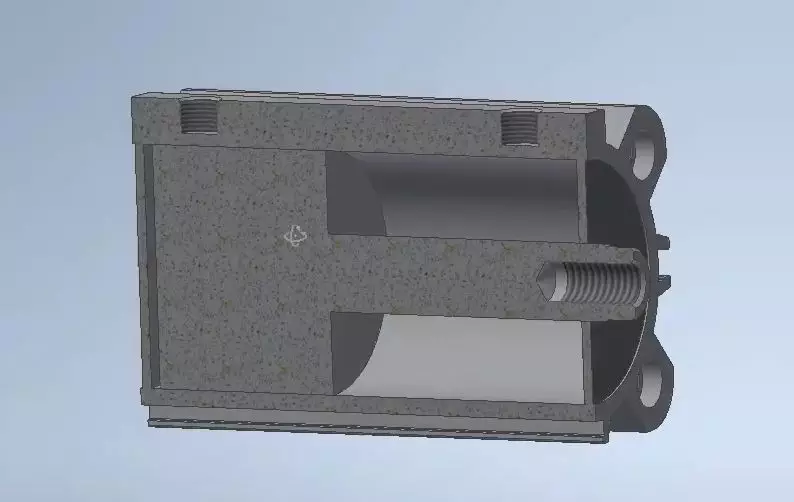
Пневмоцилиндр готов для вставки в сборку.
Это уже серьезная заявка на профессионализм нового курса. Хочется надеяться, что другие разделы будут приближены к реальным требованиям конструкторских задач сегодняшнего дня.